Any sufficiently advanced technology is equivalent to magic - Arthur C. Clarke Today, evolving technology is helping and assisting people in their day-to-day lives. In Sri Lanka, the registration of motor vehicles is increasing by huge amounts each year. In other words, day-by-day, the number of vehicles on the road is increasing and it is questionable whether infrastructure and other roads facilities are increasing parallel to it, as the number of road accidents has dramatically increased.
 Vehicle speed is one of the key components behind road accidents. Most of the drivers neglect speed limits specified on sign boards. In a different perspective, the cause for road accidents can be noted as the driver’s inability to process visual information while driving, it may be due to speed, weather, etc.
Vehicle speed is one of the key components behind road accidents. Most of the drivers neglect speed limits specified on sign boards. In a different perspective, the cause for road accidents can be noted as the driver’s inability to process visual information while driving, it may be due to speed, weather, etc.
The most important visual information is provided by road signs. Road signs are designed to assist the driver while navigating the vehicle to get to the destination efficiently and safely. Implementing an automated road sign detection and recognition system is a good solution to increase safety.
Automated road sign detection and recognition systems provide an additional level of driver assistance, leading to improved safety for passengers, road users and vehicles. It can be used to benefit drivers by alerting them about the presence of road signs to reduce risks in situations of driving distraction, fatigue, poor sight and weather conditions.
For the past years many researchers in different countries have conducted researches related to road sign detection process. Only few researches have been conducted for Sri Lankan domain and still there are many open issues. Main intention of this research was to improve a solution to identify road signs with high accuracy in different weather and vehicle speed. And also to use this solution for existing vehicles with minimum installation effort.
Process
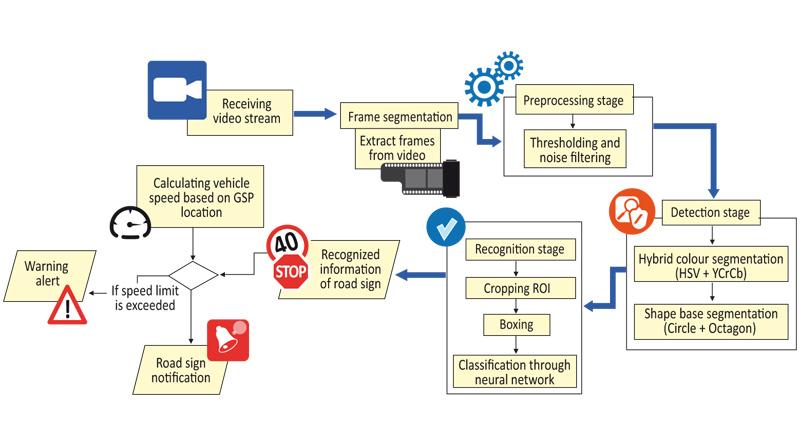
The road sign detection process is divided into two main stages. The first stage is road sign detection which detects the road sign in the image using different techniques such as, colour and shape based sign detection. Second stage is Road sign recognition, which recognizes input road sign by comparing the pre-trained set of road signs. Thereafter, road sign classification is conducted.
 Colour is one of the main components when identifying different road signs. The colour space which used should be able to apply in all the situations and result the same colour every time without the variations in exposure. The colour of the sign fades with time as a result of long exposure to sunlight, and the reaction of the paint with the air. Therefore the proposed solution uses combination of HSV and YCrCb colour spaces because of properties of these colour spaces have the ability of separating the brightness information from the colour information.
Colour is one of the main components when identifying different road signs. The colour space which used should be able to apply in all the situations and result the same colour every time without the variations in exposure. The colour of the sign fades with time as a result of long exposure to sunlight, and the reaction of the paint with the air. Therefore the proposed solution uses combination of HSV and YCrCb colour spaces because of properties of these colour spaces have the ability of separating the brightness information from the colour information.
Success rate
The utilization of chrominance or chromaticity in the YCrCb and HSV colour space provides the opportunity for robust detection. Therefore, the implemented solution has improved the identification of specific colour regions which may differ due to lighting and weather conditions by combining the YCrCb and HSV colour spaces. A successful segmentation rate of approximately 96% was achieved using this hybrid algorithm.
Road signs have a defined shape such as circle, octagon, etc. Therefore, these constraints of shape properties are used to eliminate some of the candidates which cannot be a sign. Algorithms were developed to determine the shape of the sign. The final decision of the road sign detection is based on the combination of colour and shape of the sign. The recogniser was tested in a variety of testing conditions giving an overall performance of approximately 78%. Some of the road signs are covered from another obstacle, therefore, road sign are not properly detected and road signs may appear rotated or angled due to the imaging orientation and etc. Implementation minimizes these issues using shape detection.
Colour and shape combination of segmentation reduces the number of false alarms. Hence, it decreases the number of objects to be sent for classification. Multilayer feedforward neural networks have been designed for the speed sign classification and stop sign classification process. The average classification rate achieved is about 89%.
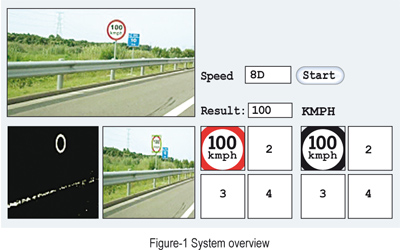
Presented work (explained in figure:1) has achieved 88% of an accuracy rate along with an average efficiency rate of 0.0467 seconds for recognizing speed signs in Sri Lankan road sign context.
A number of contributions were proposed. However there exist possibilities to further enhance the research work which can lead to further improvement of functionality and robustness of the algorithms proposed.
Lahiru Amalka N. Yapa
Member, Computer Society of Sri Lanka.